
Automotive electronic test system based on CAN frame test and embedded design
The automobile industry is the pillar industry of the country, and the electronics industry is also the pillar industry of the country. As the intersection of the automobile industry and the electronics industry, the rise and fall of the automotive electronic parts industry is closely related to the national economy. At present, the output of China's automobiles is rising year by year. While the national automobile brand continues to grow, it also forces international automobile companies or joint ventures to reduce production costs and implement the localization strategy of automotive electronic components. This is the industrialization of China's automotive electronics. The development provides a good opportunity.
This article refers to the address: http://
In addition to its complex functional requirements, pre-installed automotive electronics products are very strict in terms of real-time, safety, reliability and environmental protection, and automotive manufacturers have their own relevant inspection standards and production process specifications. It is very necessary to develop the corresponding fault detection system for the front-loading of automotive electronic products.
1 system design
1.1 Design basis
As a serial car bus, CAN bus has the advantages of simple structure, high reliability and mature technology. It has been widely used in the automotive field. The pre-installed automotive electronics must follow the CAN communication protocol of the specific model. Almost all control and status information of the vehicle depends on the CAN bus transmission. By collecting and analyzing the signals on the CAN bus, the working status and real-time of each component can be accurately obtained. Parameters, this is the basic basis of automotive electronic test systems.
The general requirements of automotive manufacturers for test equipment include real-time, reliability, portable and friendly human-computer interaction. Due to its flexible hardware and software design, good reliability and real-time performance, and low power consumption, embedded systems can fully meet the requirements of manufacturers for test instruments. Therefore, CAN-based frame testing and embedded design are effective solutions for automotive electronic test systems.
1.2 Implementation plan
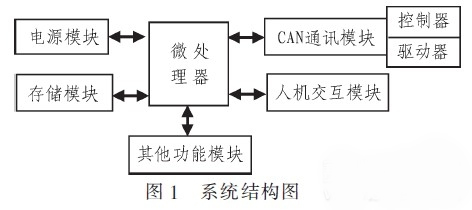
Embedded automotive electronic test system, generally choose 32-bit microprocessor with better performance, such as ARM processor, including hardware module, storage module, human-computer interaction module, etc. of embedded system in hardware design, based on CAN bus communication The corresponding CAN bus communication module must be designed. In this module, it usually consists of two parts, one is the CAN controller, which is used to implement the data link layer protocol of CAN bus; the other part is the physical layer of CAN driver for implementing CAN bus. . The basic structure of the system is shown in Figure 1.
Automotive electronic test equipment generally requires friendly human-computer interaction, and the requirements for interface design are relatively high. Therefore, layered software design methods should be adopted in software design. In general, it is necessary to transplant related embedded operating systems. Embedded operating systems mainly include Linux, Wince, and so on. The software design process mainly includes three stages: operating system porting, driver writing, and application design. Porting a suitable embedded operating system to build a development platform for software development; developing related drivers to support hardware devices and providing interfaces for application software access hardware. In CAN modules, it is generally necessary to develop support controllers and drivers. Drivers to facilitate communication with automotive electronics; applications are the top-level software that directly faces the user and provides friendly interaction for user use.
2 System design examples
Based on the above system analysis, a specific design example explanation is given. The USB car audio playback system is a front-mounted automotive electronics product developed for an automobile manufacturer. The product strictly complies with the CAN bus protocol provided by the manufacturer in communication. This test system is mainly used for fault detection before parts leave the factory.
2.1 Hardware Design
Taking into account the requirements of performance, power consumption, stability, etc., choose Intel's 32-bit industrial-grade microprocessor PXA270, which is based on ARM10 core, running at up to 520M-Hz, rich interface resources, and added IntelSpeedStep dynamic power supply. Management technology minimizes device power consumption while maintaining CPU performance. This processor simplifies hardware design and ensures fast software operation; the memory module uses 64 MB of NorFlash and 64 MB of SDRAM; Human-computer interaction uses a solution for liquid crystal display and touch control.
In the design of the CAN bus communication module, the chips used are SJA1000, PCA82C250 and TJA1055. SJA1000 is a stand-alone CAN controller released by PHLIPS for automotive and general industrial environments. SJA1000 is an alternative to PCA82C200 controller. In addition to supporting BasicCAN operation mode, it also adds a new operating mode PeliCAN. CAN2.0B protocol with many new features. The SJA1000 is used in the CAN hardware module to implement the data link layer protocol of the CAN bus. In this design, two SJA1000 chips are used for high-speed CAN and low-speed CAN communication. The specific circuit schematic of SJA1000 is shown in Figure 2. The data buses AD0~AD7 are connected to the data bus MD0~MD7 of PXA270 through the data buffer device. The timing control and other signal lines are connected to the CPLD, and the PXA270 processor passes the CPLD. management.

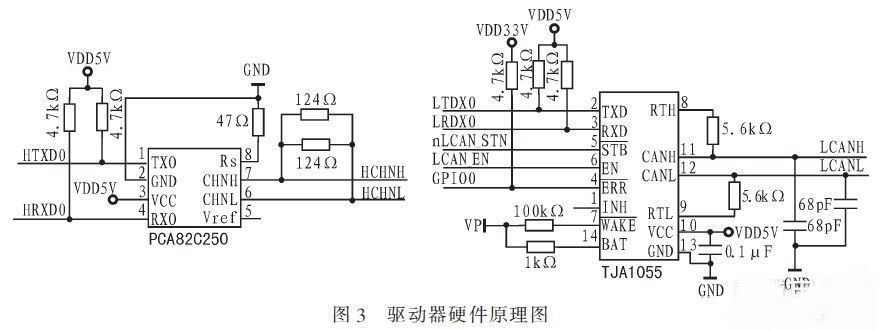
Both the PCA82C250 and TA1055 drive transceivers are used to implement the physical layer of the CAN bus. The difference is that the two chips each implement two standards of the CAN physical layer: high-speed CAN and low-speed CAN. High-speed CAN provides a baud rate of up to 1 Mbit/s depending on the cable length. Low-speed CAN provides a baud rate of 5 to 125 kbit/s, and allows the CAN bus to continue communication when the connection fails, so it is also called fault tolerance. CAN, the instrument supports two physical standards, the circuit diagram of the driver is shown in Figure 3. HTXD0, HRXD0, LTXD0, and LRXD0 are all from SJA1000. After PCA82C250 and TJA1055, high-speed CAN channels HCHNH, HCHNL and low-speed CAN channels LGANH and LCANL are obtained respectively.
2.2 Software Design
Considering that manufacturers have higher requirements for human-computer interaction, and in order to shorten the development cycle, Microsoft Windows CE is selected as the embedded operating system. Wince is a compact, complete and extensible embedded operating system. It is a multi-threaded, priority-based preemptive operating system with memory management that can suppress the risk of directly destroying the system due to abnormal application. It is suitable for hardware platforms with limited resources, and Wince's operating system inherits the style of desktop Windows system in interface operation, which is convenient for the familiarity and use of operators.
The main work of software design includes the transplantation of Wince5.0 system on PXA270, CAN bus, LCD display, touch screen, Flash storage, Bluetooth and other driver implementation, CAN protocol implementation and application design.
Wince drivers are mainly divided into native drivers and stream interface drivers. Native drivers are hardware-required drivers. They do not support general-purpose device driver interfaces, such as touch-screen drivers. Stream interface drivers refer to drivers that use streaming interface functions. Open out, regardless of the type of device that the driver controls. The driver of CAN bus is mainly the software support of controller SJA1000. It is a typical stream interface driver in wince. It realizes the function of SJA-1000 through functions such as CAN_Init, CAN_Open, CAN_Close, CAN_Read, CAN_Write, CAN_IOControl, CAN_Deiit; among them CAN_Init mainly Complete the initialization of SJA1000, CAN_Open is used to respond to application requests, CAN_Read and CAN_Write are used to read and write characters from the CAN bus, CAN_IOControl is used to extend other functions, CAN_Close is used to close the response, CAN_Deiit is used to release Resources and uninstall drivers.
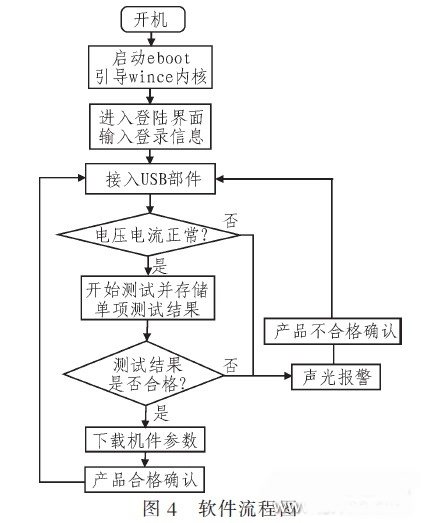
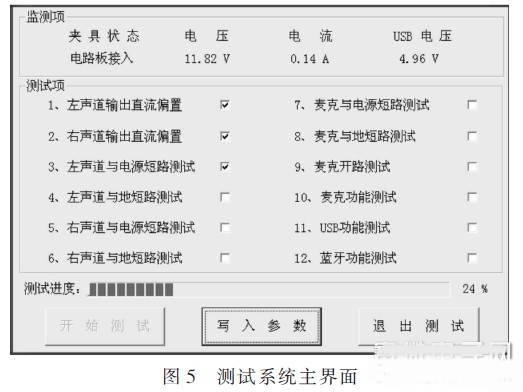
The application was developed using Embedded Visual C++ 4.0. The test instrument has many tasks. Most of the tests are based on the analysis of the CAN frame sent by the component. The main test functions of the instrument include: audio left and right channel test, microphone test, Bluetooth test, USB test and so on. The software flow of the system is shown in Figure 4. The main interface of the system is shown in Figure 5.
2.3 Field application
The test instrument has been used in on-site production to perform pre-shipment quality testing on USB car audio playback components. Practice shows that the test instrument is fast, reliable and user-friendly, and can detect 300 to 500 components per working day. The rate is over 99%, which fully meets the needs of manufacturers.
3 Conclusion
In this paper, based on the specific needs of automotive electronics development, an automotive electronic test method based on CAN communication and CAN frame analysis is proposed. The field application shows that this method is a fast and effective method for testing pre-installed automotive electronic products. Automotive electronic test equipment meets the needs of manufacturers for volume, price, speed, reliability, etc., and will continue to be widely used in front-mounted automotive electronics products.
MARSHINE insulated conductor gripper utilizes the serpentine and wavy jaw, which provides wonderful clamping effect and also effectively protects the insulation layer.
Ningbo MARSHINE Power Technology Co., Ltd. is a professional engaged in the development, design and manufacture of power engineering construction equipment and tools.
MARSHINE company produces circuit construction tools, including foundation construction, tower group lap. Wiring structure. Cable construction, cable construction, mobile knife mill, insulated overhead cable and high voltage cable stripper, all kinds of aluminum alloy pull rod, guide rail, grounding device, high strength shackle, ratchet wrench and pointed wrench, double hook tight line device, lifting pulley, nylon wheel and aluminum wheel, punching machine ect.
MARSHINE continues to carry forward the enterprise spirit of "integrity, development, innovation" and strive for the prosperity and development of the electric power industry.
Welcome to contact MARSHINE and reach cooperation, thank you!
Insulated Conductor Gripper,Come Along Clamp Grip,Aluminium Alloy Insulated Conductor Gripper,Aluminum Wire Gripper for Insulated Conductor
MARSHINE , https://www.puller-tensioner.com